DexMimicGen produces large-scale bimanual dexterous manipulation datasets with minimal human effort
We used DexMimicGen to autonomously generate over 20,000 demonstrations for bimanual dexterous robots from just 60 source human demonstrations across 9 tasks, multiple simulators, and the real-world.
MimicGen datasets can produce performant policies across diverse tasks with simple Behavioral Cloning
Can Sorting
Success Rate: 97.3 ± 0.9%
Coffee
Success Rate: 77.3 ± 0.9%
Pouring
Success Rate: 79.3 ± 0.9%
Tray Lift
Success Rate: 88.7 ± 0.9%
Box Cleanup
Success Rate: 92.0 ± 4.3%
Drawer Cleanup
Success Rate: 76.0 ± 0.0%
Threading
Success Rate: 69.3 ± 1.9%
Transport
Success Rate: 83.3 ± 0.9%
Piece Assembly
Success Rate: 80.7 ± 0.9%
Policy performance improves with larger DexMimicGen datasets
DexMimicGen leverages a Real2Sim2Real pipeline to train performant policies for the real world
DexMimicGen can generate diverse datasets from few human demonstrations for new reset distributions
We showcase datasets generated by DexMimicGen across different reset distributions for three tasks in Robosuite below.
Pouring
Reset Distribution D0
Reset Distribution D1
Reset Distribution D2
Box Cleanup
Reset Distribution D0
Reset Distribution D1
Reset Distribution D2
Three Piece Assembly
Reset Distribution D0
Reset Distribution D1
Reset Distribution D2
Drawer Cleanup
Reset Distribution D0
Reset Distribution D1
DexMimicGen generates datasets for different simulation frameworks
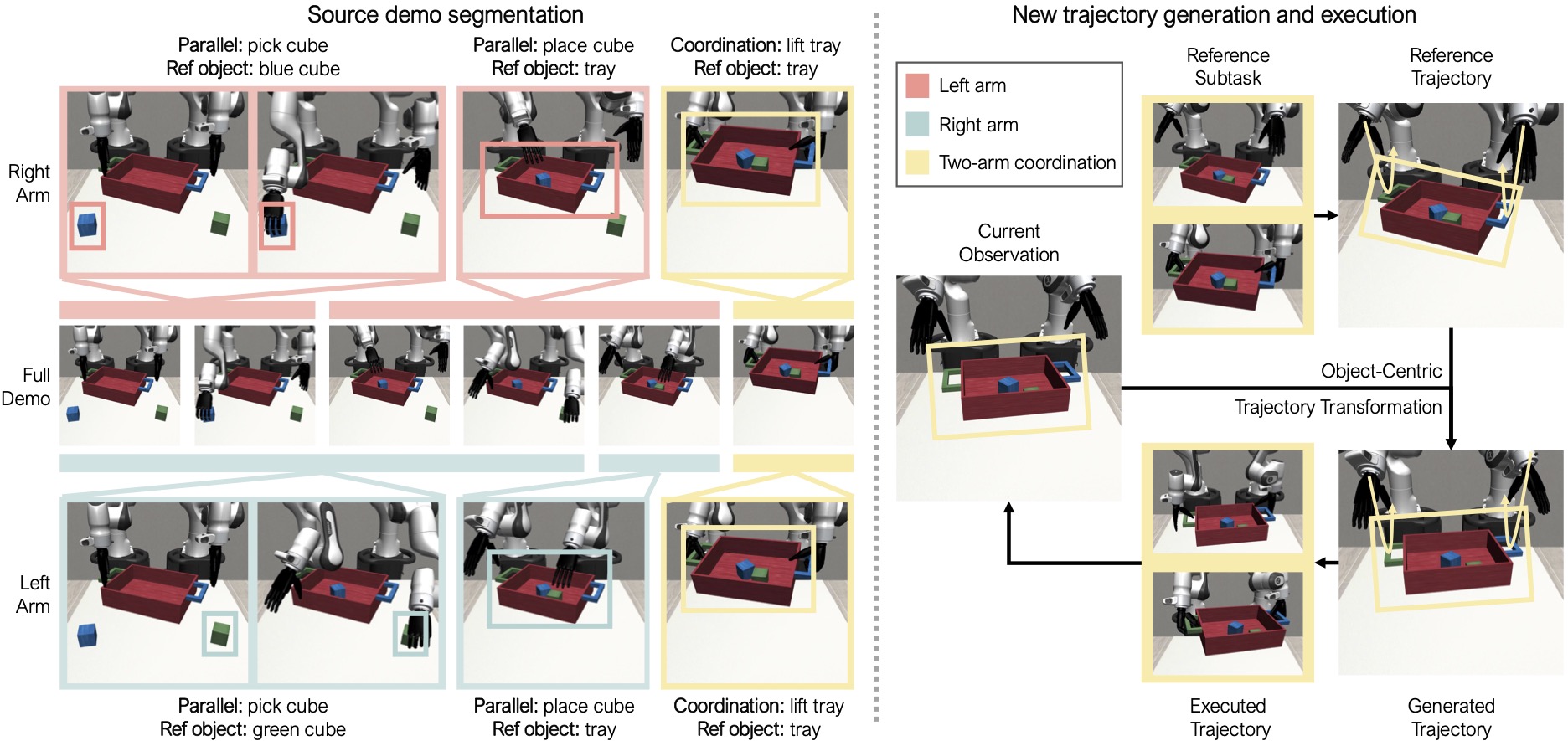
DexMimicGen Pipeline Overview
BibTeX
@inproceedings{jiang2024dexmimicen,
title = {DexMimicGen: Automated Data Generation for Bimanual Dexterous Manipulation via Imitation Learning},
author = {Jiang, Zhenyu and Xie, Yuqi and Lin, Kevin and Xu, Zhenjia and Wan, Weikang and Mandlekar, Ajay and Fan, Linxi and Zhu, Yuke},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025}
}
Contact
If you have any questions, please feel free to contact Zhenyu Jiang, Ajay Mandelkar, Jim Fan and Yuke Zhu.